倒立摆系统的建模、分析与设计
创作时间:
作者:
@小白创作中心
倒立摆系统的建模、分析与设计
引用
CSDN
1.
https://blog.csdn.net/m0_58209778/article/details/139448174
倒立摆系统是一种典型的非线性控制对象,广泛应用于控制理论的教学和研究中。本文将介绍倒立摆系统的建模、分析与设计过程,包括系统稳定性分析、状态反馈控制器设计以及降维状态观测器的实现。
一、案例背景
倒立摆系统是一个经典的控制理论研究对象,其主要特点是具有非线性、不稳定性和多输入多输出特性。通过建立倒立摆系统的线性状态空间模型,可以对其进行深入的分析和设计。
二、建模分析
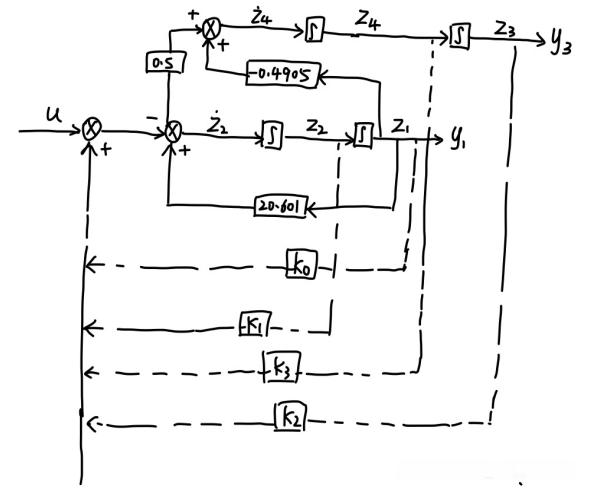
由PDF知,倒立摆系统的线性状态空间表达式为:
则有:
2.1 系统稳定性、能控性和能观性分析
在Matlab环境下,可以分析系统的稳定性、能控性和能观性。以下是具体的代码实现:
%{
1.在Matlab 环境下,分析系统的稳定性、能控性及能观性。
%}
A = [0 1 0 0;20.601 0 0 0; 0 0 0 1;-0.4905 0 0 0];
B = [0;-1;0;0.5];
C = [1 0 0 0;0 0 1 0];
n = size(A, 1)
% 系统的状态空间表示
sys = ss(A, B, C, 0);
% 稳定性分析
%计算特征值
eigenvalues = eig(A)
if all(real(eigenvalues) < 0)
disp('系统是稳定的.');
else
disp('系统是不稳定的.');
end
% 能控性分析
Uc = [B, A*B, A^2*B,A^3*B];
rank_Uc = rank(Uc)
if rank_Uc == n
disp('系统是能控的.');
else
disp('系统是不能控的.');
end
% 能观性分析
Uo = [C; C*A; C*A^2;C*A^3];
rank_Uo = rank(Uo)
if rank_Uo == n
disp('系统是能观的.');
else
disp('系统是不能观的.');
end
结果显示,该系统不稳定,但是能控能观。
2.2 开环仿真验证
在SIMULINK环境下,可以进行系统开环仿真,验证系统的稳定性。具体步骤如下:
- 连接State-Space块的输出到Scope块的输入。
- 连接Step块的输出到State-Space块的输入。
- 配置State-Space块的系统状态空间矩阵(A、B、C、D)。
- 设置Step块的阶跃信号参数。
- 调整Scope块的显示参数。
- 运行仿真并查看系统的响应。
通过这些步骤,可以在SIMULINK中建立一个简单的系统,并使用State-Space块描述系统的动态行为,Step块产生一个阶跃信号作为输入,Scope块用于查看系统的输出响应。结果显示,系统是不稳定的。
三、状态反馈控制器设计
由倒立摆系统的线性状态空间表达式可得系统的状态方程和输出方程。以下是状态反馈控制器的设计过程:
3.1 计算反馈增益阵
%{
在SIMULINK环境下,给定系统期望的极点,设计状态反馈控制器,
并通过仿真验证其性能
%}
% 定义系统矩阵
A = [0 1 0 0; 20.601 0 0 0; 0 0 0 1; -0.4905 0 0 0];
B = [0; -1; 0; 0.5];
C = [1 0 0 0; 0 0 1 0];
D = [0; 0];
% 计算可控性矩阵
Co = ctrb(A, B);
% 检查可控性
rank_Co = rank(Co);
if rank_Co == size(A, 1)
disp('系统是可控的。');
else
error('系统不可控,请重新设计系统或控制器。');
end
% 给定的期望闭环极点
desired_poles = [-2, -3, -4, -5];
% 计算状态反馈增益矩阵 K
K = place(A, B, desired_poles)
3.2 建立Simulink模型
建立Simulink模型并运行仿真,观察四个状态的变化。实验结果表明,倒立摆很短时间内收敛到0,控制效果很好。
四、降维状态观测器设计
4.1 设计降维状态观测器
将观测值代入状态反馈建立Simulink模型(降维状态观测器)。为了简化框图,将原系统模型替换成了直接State space表示的形式,具体设置为:这里给定倒立摆角度的初值1,其他全部设为0。
4.2 仿真验证
运行仿真,观察四个状态的变化。将未加入观测器时的状态与加入状态观测器的状态作差,发现比较观测器观测值与实际状态的误差的时候,发现观测器已经能够很好地跟踪未知状态了。
通过以上分析和设计过程,可以发现倒立摆系统虽然不稳定,但通过合理的控制器设计和状态观测器的实现,可以达到良好的控制效果。
热门推荐
鹌鹑蛋崛起之路的机遇与挑战
四级调研员的级别待遇怎么样?
便秘救星!西梅如何“通便”?每天1个身体有啥变化?劝你别多吃
提高三公里跑步技巧的方法(如何在考核中脱颖而出)
增值税(VAT)的概念、运作方式及其在经济中的重要性分析
智能设备“不下线”,为老年人打造智慧养老新模式
纯水机滤芯多久更换一次?更换步骤详解
养龟三妙招,龟友好帮手
收到骚扰短信怎么办?法律为你撑腰!
孕期肚子长红疹的临床护理
利好密集加持!23家公司中报数据资源“入表”,中国电信等龙头在名单
牛舌含有的嘌呤高吗?医生专业解读嘌呤含量与健康影响
揭秘会计与出纳对账:差异、解决与风险防范
办公室会计和出纳的区别-岗位职责-之间关系
红楼梦金钏儿为何会跳井?背后的真相是什么?
人才盘点九宫格排名标准有哪些?
一个煎鸡蛋的热量 三个煎蛋的热量相当于吃什么
掌握汉语发音的秘密:探秘前鼻音字的奥妙
硒:守护健康的“隐形卫士”,科学补硒需重视“源头”
周恩来与鲁迅:跨越700年的家族渊源
8个伤膝盖的坏习惯,4个预警信号,7个保护方法,一文读懂膝关节养护全攻略
战双帕弥什露西亚深红之渊意识搭配攻略:从入门到精通
什么是诱空操作?如何识别和应对诱空行为?
乌龙茶减肥
普洱茶养生
“好父母成就好孩子”,罗清军为父母打造的新时代家庭教育指南
不是所有的茶叶都适合冷泡!看完别再白费好茶了……
阳台推拉门改窗户后的惊艳效果:12个实用改造案例解析
喝完普洱茶后多久可以吃药?专家解读茶叶与药物的相互作用
电动汽车真的省钱吗?——一笔账算清电车的经济优势