倒立摆系统的建模、分析与设计
创作时间:
作者:
@小白创作中心
倒立摆系统的建模、分析与设计
引用
CSDN
1.
https://blog.csdn.net/m0_58209778/article/details/139448174
倒立摆系统是一种典型的非线性、不稳定系统,广泛应用于控制理论的教学和研究中。本文将详细介绍倒立摆系统的建模、分析与设计过程,包括系统稳定性分析、状态反馈控制器设计以及降维状态观测器的实现。通过Matlab和Simulink工具,我们将对系统进行详细的仿真和验证。
一、案例背景
倒立摆系统是一种经典的控制理论研究对象,其主要特点是非线性、不稳定。本文将基于倒立摆系统的线性状态空间表达式,进行系统建模、分析与设计。
二、建模分析
由PDF知,倒立摆系统的线性状态空间表达式为:
则有:
3.1 在Matlab 环境下,分析系统的稳定性、能控性及能观性。
代码如下:
%{
1.在Matlab 环境下,分析系统的稳定性、能控性及能观性。
%}
A = [0 1 0 0;20.601 0 0 0; 0 0 0 1;-0.4905 0 0 0];
B = [0;-1;0;0.5];
C = [1 0 0 0;0 0 1 0];
n = size(A, 1)
% 系统的状态空间表示
sys = ss(A, B, C, 0);
% 稳定性分析
%计算特征值
eigenvalues = eig(A)
if all(real(eigenvalues) < 0)
disp('系统是稳定的.');
else
disp('系统是不稳定的.');
end
% 能控性分析
Uc = [B, A*B, A^2*B,A^3*B];
rank_Uc = rank(Uc)
if rank_Uc == n
disp('系统是能控的.');
else
disp('系统是不能控的.');
end
% 能观性分析
Uo = [C; C*A; C*A^2;C*A^3];
rank_Uo = rank(Uo)
if rank_Uo == n
disp('系统是能观的.');
else
disp('系统是不能观的.');
end
结果显示,该系统不稳定,但是能控能观。
3.2 在 SIMULINK环境下,进行系统开环仿真,验证系统的稳定性。
步骤如下:
- 连接这些块:
- 连接State-Space块的输出到Scope块的输入。
- 连接Step块的输出到State-Space块的输入。
- 配置这些块的参数:
- 双击State-Space块,设置系统的状态空间矩阵(A、B、C、D)。
- 双击Step块,可以设置阶跃信号的起始时间、结束时间、幅值等参数。
- 双击Scope块,调整作用域的显示参数,如选择显示的信号。
- 运行仿真:
- 点击模型窗口的 "Run" 按钮来运行仿真。
- 查看仿真结果:
- 打开Scope块的窗口来查看系统的响应。
通过这些步骤,可以在SIMULINK中建立一个简单的系统,并使用State-Space块描述系统的动态行为,Step块产生一个阶跃信号作为输入,Scope块用于查看系统的输出响应。结果显示,系统是不稳定的。
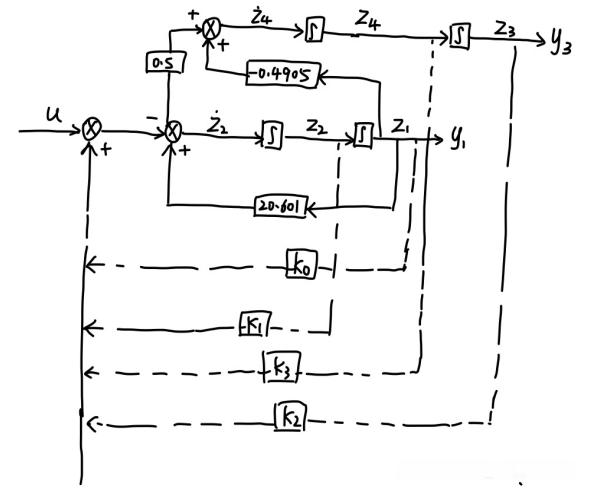
由倒立摆系统的线性状态空间表达式可得系统的状态方程和输出方程:
画出系统的模拟结构图:
计算反馈增益阵:
%{
在SIMULINK环境下,给定系统期望的极点,设计状态反馈控制器,
并通过仿真验证其性能
%}
% 定义系统矩阵
A = [0 1 0 0; 20.601 0 0 0; 0 0 0 1; -0.4905 0 0 0];
B = [0; -1; 0; 0.5];
C = [1 0 0 0; 0 0 1 0];
D = [0; 0];
% 计算可控性矩阵
Co = ctrb(A, B);
% 检查可控性
rank_Co = rank(Co);
if rank_Co == size(A, 1)
disp('系统是可控的。');
else
error('系统不可控,请重新设计系统或控制器。');
end
% 给定的期望闭环极点
desired_poles = [-2, -3, -4, -5];
% 计算状态反馈增益矩阵 K
K = place(A, B, desired_poles)
建立simulink模型
运行仿真,观察四个状态的变化
实验结果表明,倒立摆很短时间内收敛到0,控制效果很好。
设计降维状态观测器
将观测值代入状态反馈建立simulink模型(降维状态观测器)
为了简化框图,将原系统模型替换成了直接State space表示的形式,具体设置为:这里给定倒立摆角度的初值1,其他全部设为0
运行仿真,观察四个状态的变化
将未加入观测器时的状态与加入状态观测器的状态作差,发现比较观测器观测值与实际状态的误差的时候,发现观测器已经能够很好地跟踪未知状态了。
热门推荐
注射玻尿酸导致失明,法院判决美容院赔偿50余万元
宝可梦无限融合5.0.36(70君群汉化版)精细养成攻略
《诗经·子衿》原文及赏析
股二头肌拉伸最有效的动作
INTP人格类型全解析:特点、优缺点、功能与MBTI相关思考
银行卡损坏后更换的新卡卡号会变吗?
如何分析市场的周期性变化
全面解析hosts文件:修改方法与网络应用技巧
警惕过于关注维持现有的关系而忽视追求个人成长和实现自我价值
如何说服别人:8个步骤助你有效沟通
在武汉生活有哪些刚性支出?武汉最低生活标准是多少?武汉宜居吗?
如何评估定居杭州的生活质量?这种评估对生活选择有何帮助?
甲状腺瘤切除需要住院几天
NPU 基础:AI 芯片的技术与应用
如何指导小学生写好《水浒传》读后感
道家八字命理全书详解:从基础到应用的完整指南
如何冷冻百香果
她们的温柔铠甲:秋冬风衣,穿出独立与从容
如何用C语言输出一个心型字符串
千古雄文《正气歌》,全文300字,道尽浩然正气、坚毅与通透的人生态度
DIF指标在技术分析中的特征与应用
道家八字命理解析:如何通过道家哲学洞察个人命运
公司混同劳动关系如何认定
丹·奥维尤斯:典型的校园欺凌者,有这些特征
增程式电动车的续航里程真的能满足日常出行吗?
建水团山村:滇南古村落的历史印记
6万、8万、10万、13万、17万,值得买的5款车
一图读懂丨又红又痒的过敏性结膜炎,该用什么药?
智慧社区健身中心如何利用技术提升居民健身体验
哈电汽轮机自主研制16兆瓦燃气轮机总装下线