【数据结构与算法】迷宫求解------回溯法
创作时间:
作者:
@小白创作中心
【数据结构与算法】迷宫求解------回溯法
引用
CSDN
1.
https://m.blog.csdn.net/qq_74047911/article/details/140951648
回溯法是一种通过尝试解决子问题来解决问题的算法策略。当在某一步无法继续前进时,算法会回退到上一步,尝试其他可能的解决方案。本文将通过一个迷宫求解的例子,详细介绍回溯法的实现过程。
回溯法
一.迷宫求解算法
当我们想要找到迷宫的出口,那我们在计算机中,然后操作,可以将每个位置都人栈,然后进行上下左右的路的判断,能否通过,若是死路,就将这个点出栈,回退到刚刚的栈,再判断其他的道路.
这中栈的回退就是回溯法.
二.二维数组表示地图
1.地图
1表示通路,0表示死路.
地图的结构就是一个二维数组,初始化就是进行赋值.
2.地图的打印
就是二维数组的打印.
三.进入迷宫
假设这个位置就是我们的入口.
四.栈的实现
#pragma once
#include <iostream>
using namespace std;
#define MAXSIZE 128
typedef struct ArrayPosition
{
int a;
int b;
}ArrayPosition;
typedef ArrayPosition DataType;
typedef struct Stack
{
DataType* base;
DataType* top;
}Stack;
bool initStack(Stack& S)
{
S.base = new DataType[MAXSIZE];
if (!S.base)return false;
S.top = S.base;
return true;
}
bool PushStack(Stack& S, DataType data)
{
if (S.top - S.base == MAXSIZE)return false;
*(S.top++) = data;
return true;
}
bool PopStack(Stack& S, DataType& data)
{
if (S.top == S.base)return false;
data = *(--S.top);
return true;
}
DataType* getElem(Stack& S)
{
if (S.top != S.base)
{
return (S.top - 1);
}
}
bool isEmpty(Stack& S)
{
if (S.top == S.base)
{
return true;
}
else
{
return false;
}
}
这里和我们原来讲的栈都一样,只不过数据变成了二维数组的位置.
初始化栈就可以进入到我们的迷宫判断了.
五.迷宫内探
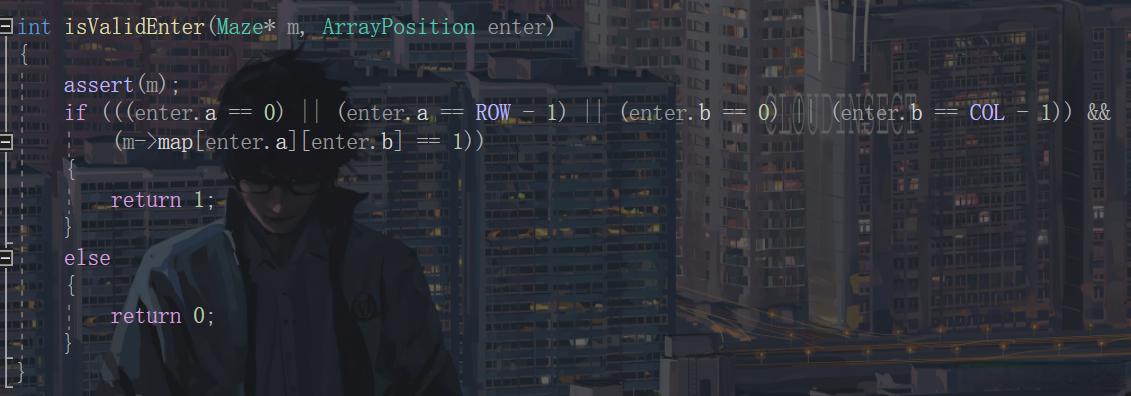
1.首先判断我们的入口
有效的入口是在边界且为通路.
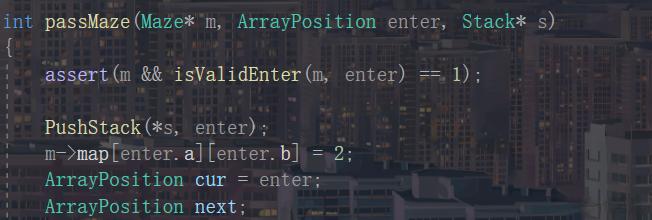
2.入栈做标记
就当前入口点入栈,然后做标记改为2,就是我们走过的地方.
3.开始探险
while (!isEmpty(*s))
{
cur = *getElem(*s);
if (isValidExit(m, cur, enter))
{
return 1;
}
//向左
next = cur;
next.b = cur.b - 1;
if (isValidNext(m, cur, next))
{
PushStack(*s, next);
m->map[next.a][next.b] = m->map[cur.a][cur.b] + 1;
continue;
}
//向上
next = cur;
next.a = cur.a-1;
if (isValidNext(m, cur, next))
{
PushStack(*s, next);
m->map[next.a][next.b] = m->map[cur.a][cur.b] + 1;
continue;
}
//向右
next = cur;
next.b = cur.b + 1;
if (isValidNext(m, cur, next))
{
PushStack(*s, next);
m->map[next.a][next.b] = m->map[cur.a][cur.b] + 1;
continue;
}
//向下
next = cur;
next.a = cur.a + 1;
if (isValidNext(m, cur, next))
{
PushStack(*s, next);
m->map[next.a][next.b] = m->map[cur.a][cur.b] + 1;
continue;
}
DataType temp;
PopStack(*s, temp);
}
return 0;
}
只有我们的栈不为空或者找不到出口,那么就一直找.
所以我们先判断是不是出口
4.出口判断
在边界但不是入口点.
然后对当前上下左右的进行判断能否下一步.
5.能否下一步
在同行同列且相邻且在二维数组范围内,值为1就是通道就可以下一步.
6.做标记
能下一步就做标记,入栈.
7.不能下一步
就出栈,进行判断上一个路口,是否可以其他的下一步.
六.运行结果
热门推荐
盐酸阿比多尔的作用与功效
饭店30元的美味,在家只需10元就能搞定,分量足味道佳,超下饭!
SEO分类策略权威指南
口才训练最常用的10个基本方法
一文了解在新加坡工作薪水和收入
胆汁反流胃炎的改善方法
长期被骚扰如何取证自首,教你一步步保护自己
商业保险如何进行明智选择?这种明智选择有哪些依据?
弯道超车,揭秘速度与转向背后的物理奥秘!
了解长焦镜头,并用好它
NVIDIA控制面板设置指南:五步优化显卡性能,提升游戏体验
米饭、面条、馒头,哪种主食更容易胖?(附减肥主食秘籍)
中国四大海域十大海鲜城市全攻略
89平米北欧风三居室:阳台变身书房,实用又美观
八字命理:从理论到实践的全面解析
亿字加一笔变京字,揭示汉字背后的文化与历史魅力
阿芙罗狄忒与维纳斯:文化与神话的镜像
小区公共收益包括哪些应该怎么分配
打造银发消费场景,推动山东养老服务消费提质增效
成都2月份穿衣指南:轻便舒适为主,注意防雨
多头母子线暗示美元/日元空转多了吗?
旧款Kindle重获新生:如何刷机安装安卓系统详细教程
M1911半自动手枪:百年经典的枪械传奇
浪漫南澳:观星望海 度假胜地
物品描述对剧情的深度影响:以《黑暗之魂》系列为例
身体容易发炎是什么原因引起的
点赞!南航研制载荷搭载“阿斯图友谊号”卫星成功发射
股市投资的心理学
《哪吒2》经典台词英文翻译:从“急急如律令”到哪吒诗作
怀孕时适合参与的有趣游戏是哪些?营造幸福家庭氛围!